リビングにあるカラーボックスに、カーテンレールを設置しました。3Dプリンターで専用のフックを作り、突っ張り棒をのせています。
リビングの棚が汚い
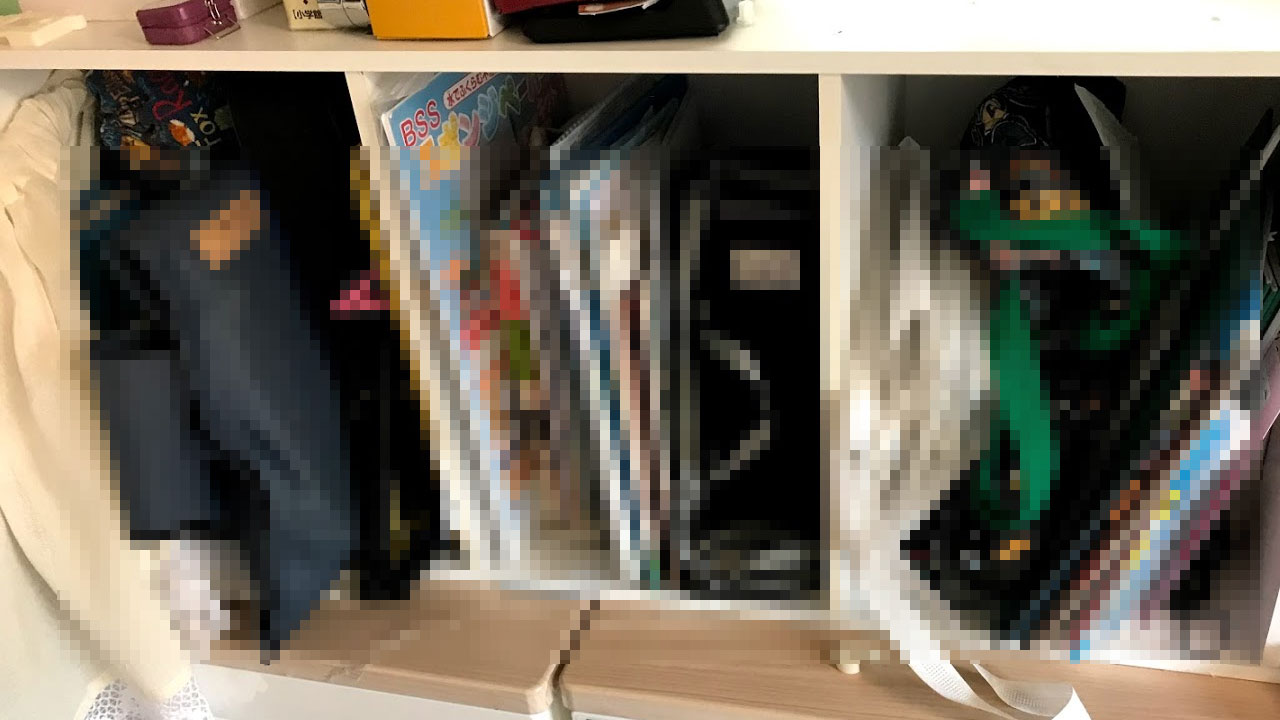
リビングに子供たちの学校で使う教材を入れるカラーボックスがあります。
ここがなかなか汚くて、リビングの景観が悪くなります。
そこで、カーテンを設置して、隠すことにしました。
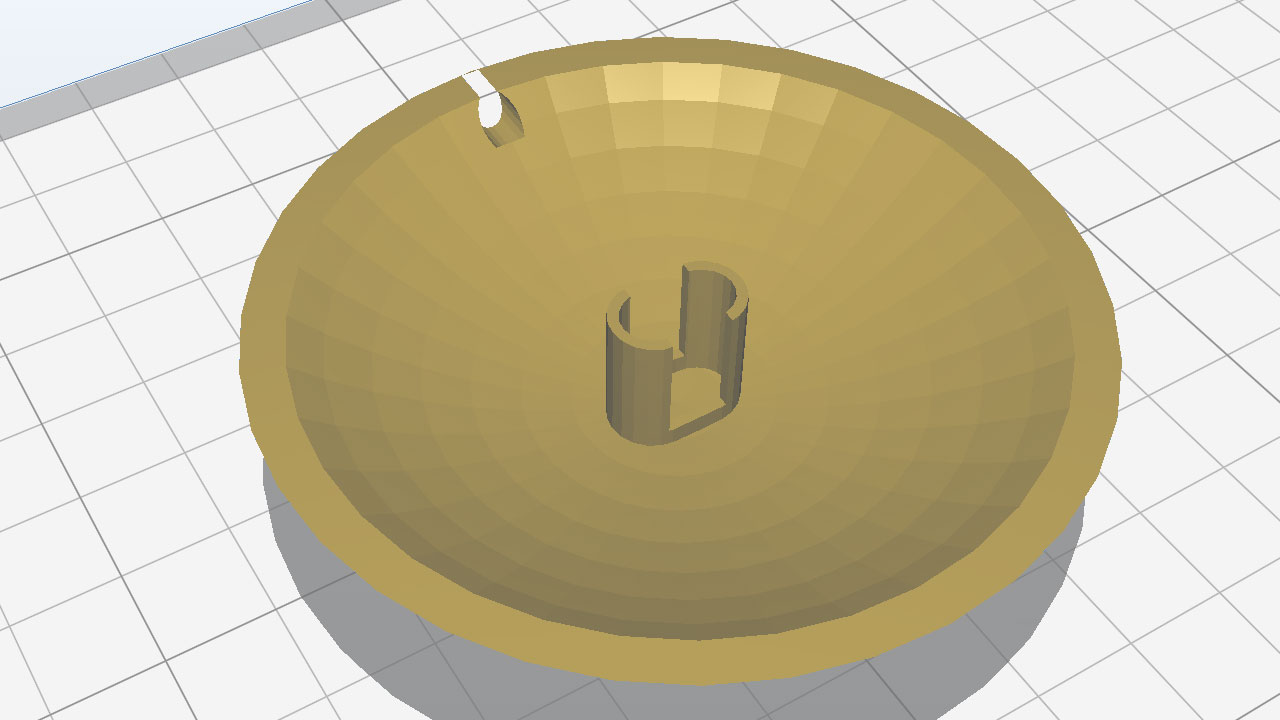
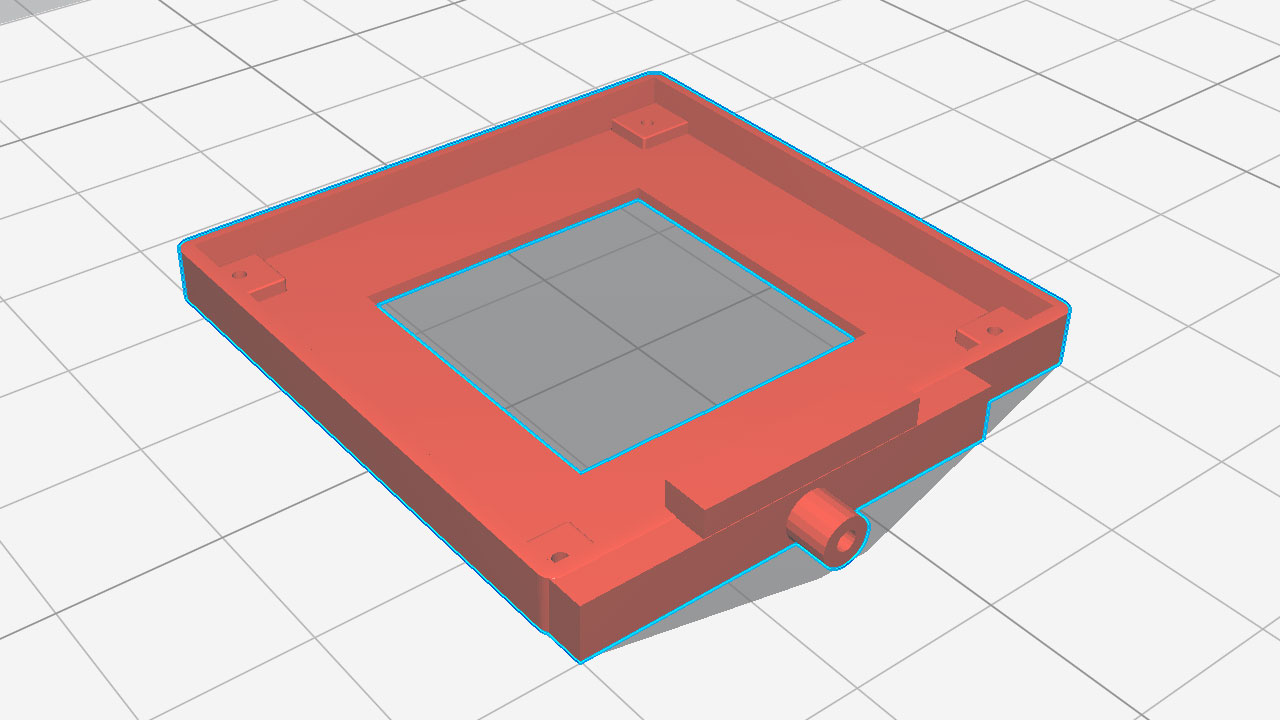
フックを3Dプリント

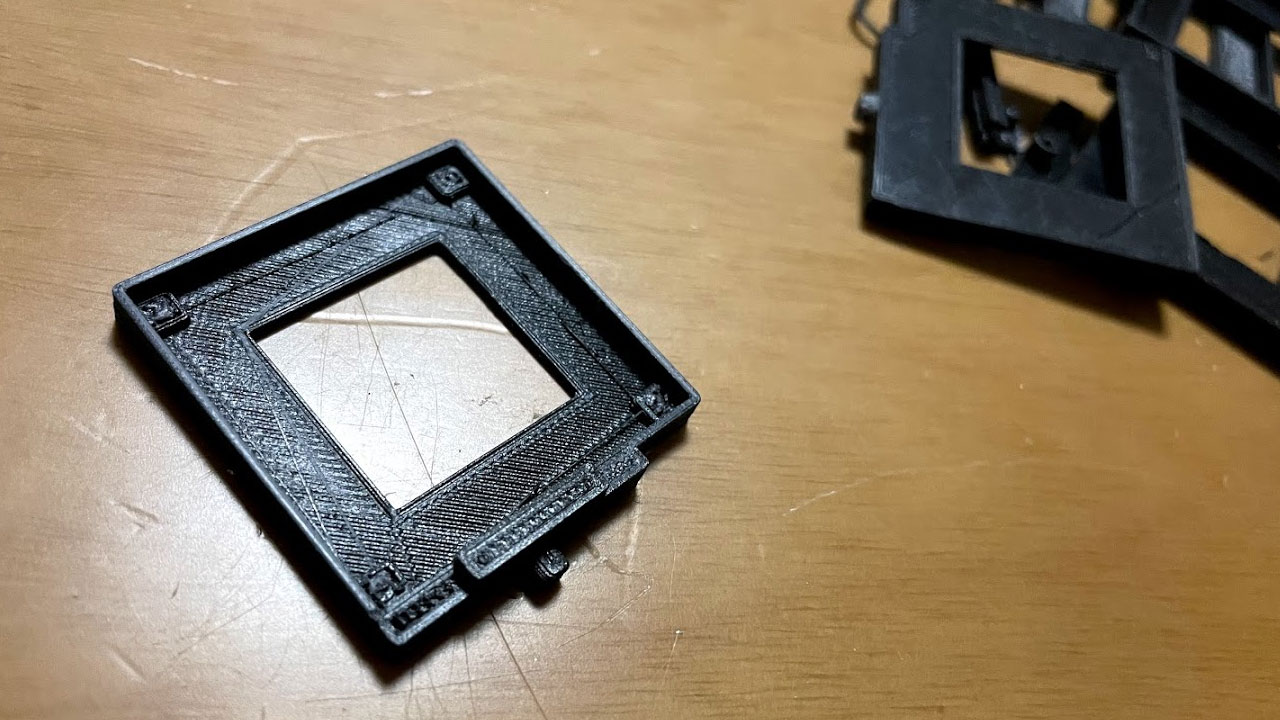
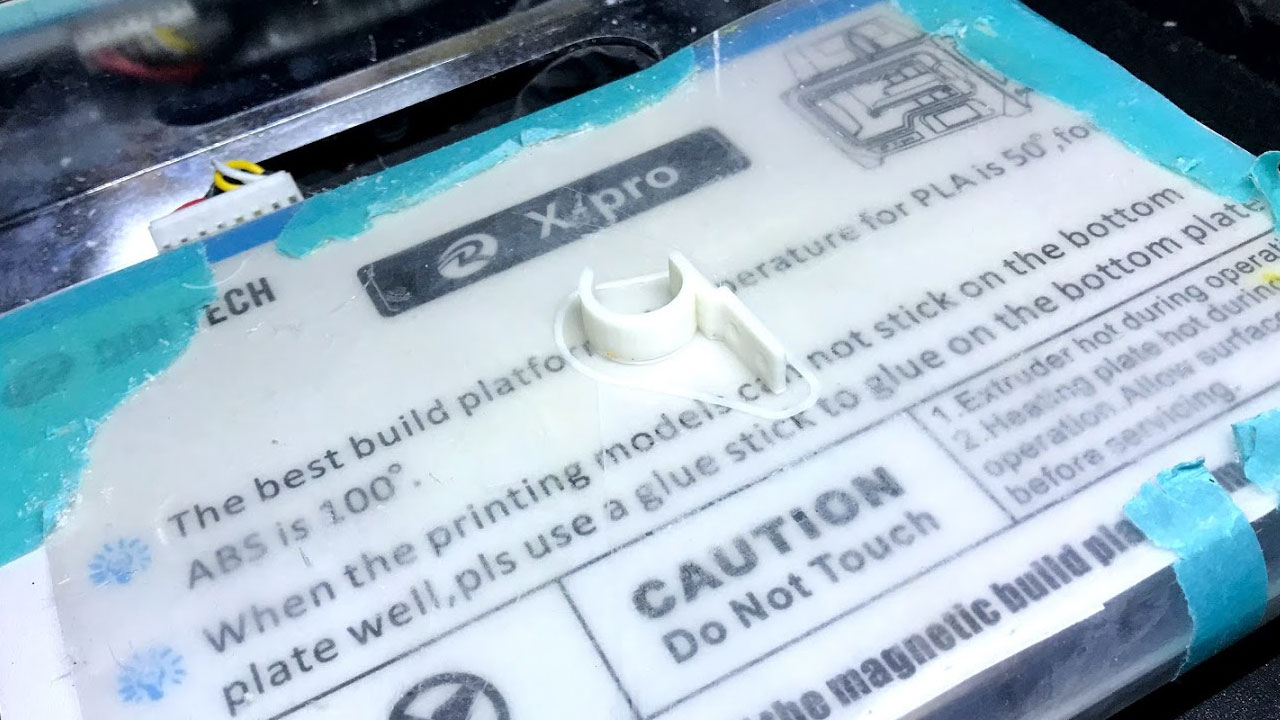
目立たない白のABSフィラメントで、フックを3Dプリントします。
「J」の字の単純なモデリングです。

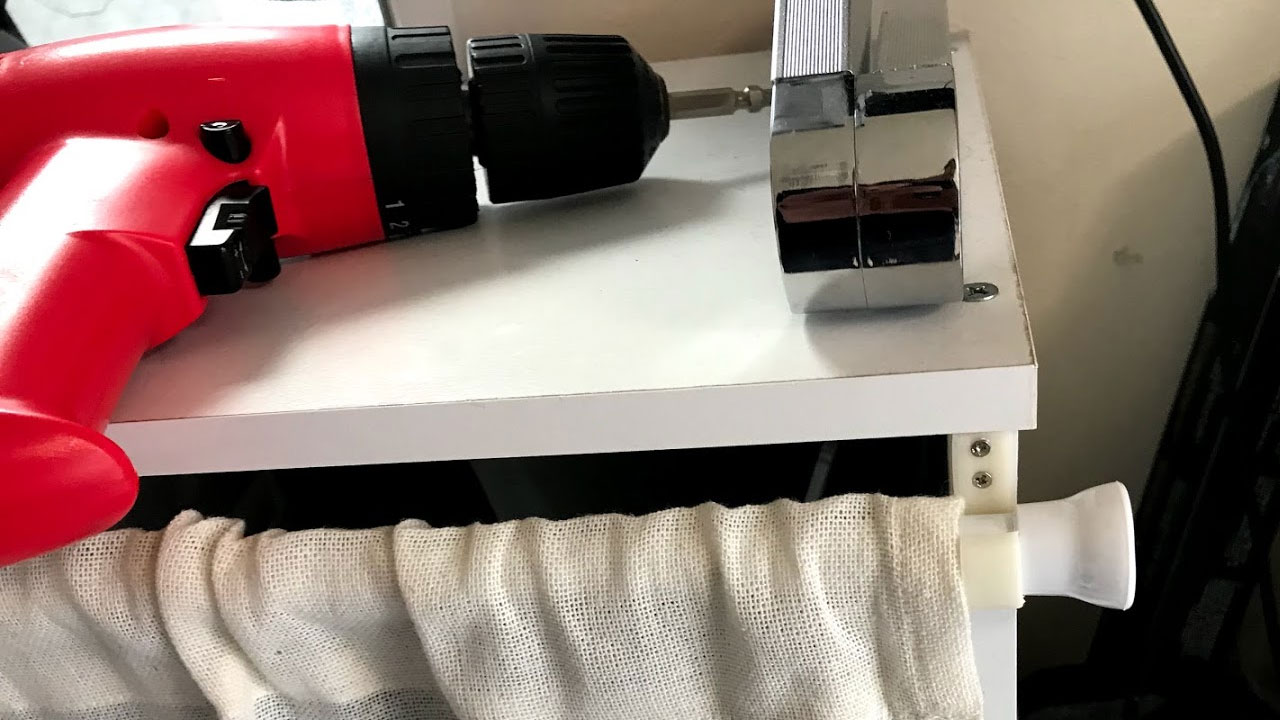
フックができたら、カラーボックスにネジ止めします。
ネジのサイズはM2を使いました。
カラーボックス上部に隙間
フックを取り付け、カーテンをかけました。
すると・・・設計ミスで、上部に隙間が空いてしまいます。
カラーボックスの天板が出っ張っていて、思うようにフックが取り付けられませんでした。
形状を合わせて作り直そう
天板の出っ張りに合わせた形状で、なおかつフックのU字部分を上部に配置するように調整しました。
フックのモデリングデータ(stl形式)はアップしています。ご自由にお使いください。

これを3Dプリントしてみると、ぴったり取り付けできました。
カーテンの棒を支えるため、もう一つプリントします。
カーテン取り付け
フックに突っ張り棒を掛け、カーテンを通し、散らかっている棚が隠れました。
カーテンも、突っ張り棒も100円ショップで購入。
リビングの散らかりが隠れて満足です。
追記
半年で2回、フックが破損しました。