ジェスチャー操作センサー「Leap Motion」が、どれくらいの精度か確認したいと思います。
デフォルトのソフト、診断ビジュアライザーを使ってテストします。
何も先入観のない子供にテストをしてもらいました。
グー・チョキ・パーの動きは前回の確認済みなので、ちょっと難易度が高そうな動きも見ていきたいと思います。
指で円を描く
人差し指でくるくる円を描きます。
これは安定して認識しています。
人差し指の認識は、特に安定しているような気がします。
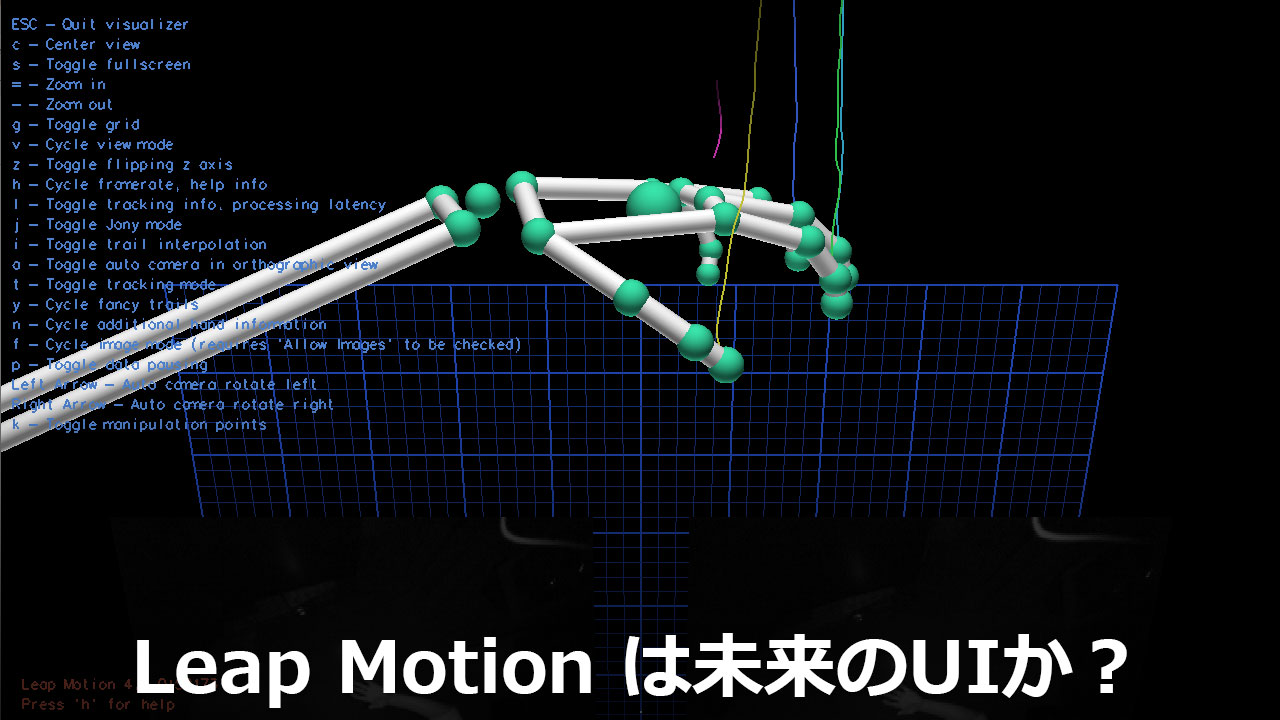
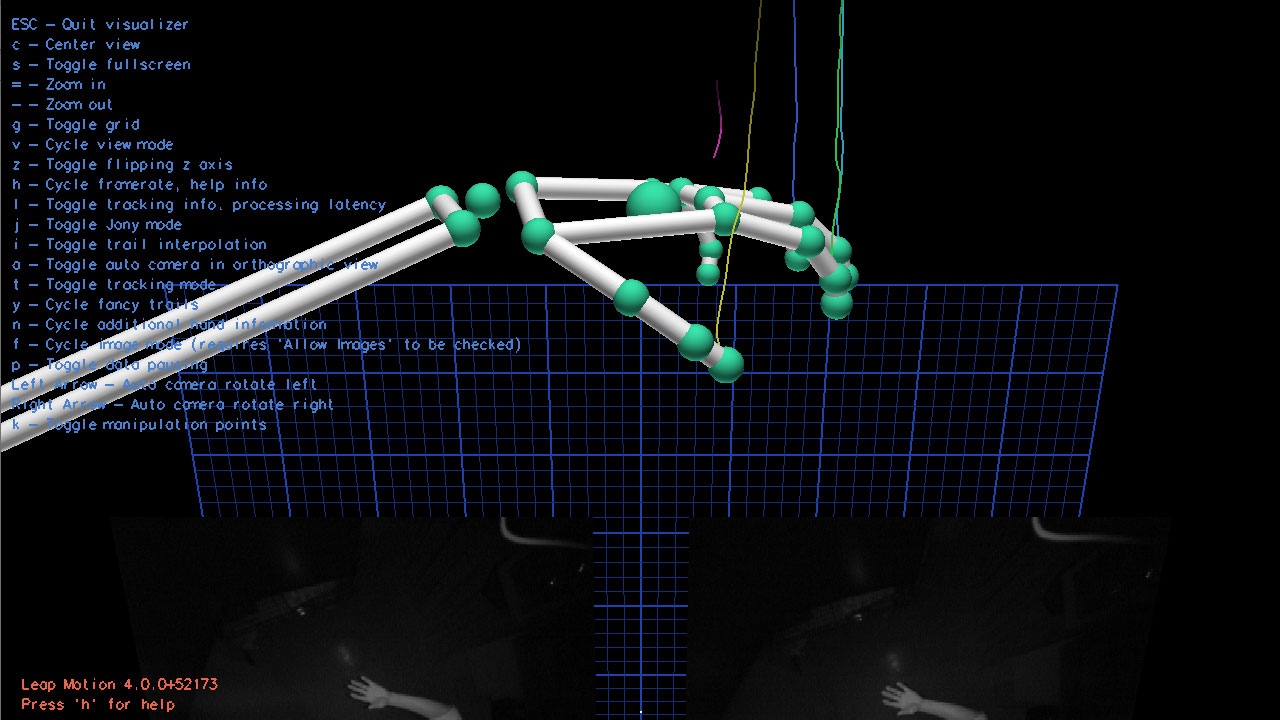
手と手を握る
次は、絶望的に難しいと思われる、手と手を握った状態にしてみます。
なんとすごい!最後に右手の認識が外れましたが、十分機能しています。
重なった手を、どうやって手と認識しているんだろう?
前フレームとの差異を比較して、間接の位置を予測し続けているのか?・・・もはや私にはわかりません。
たまに手がどこかへ行く
精度は良いとはいえ、たまに自分の手が、どこかへ行っちゃいます。
あれー、戻ってこーい!
こうなると、意図しないジェスチャーが入力される可能性はあります。
実用化に必要な精度は?
家や街中でジェスチャー入力をする機会は、いまだにありません。
タッチーセンサーのように実用化し、普及するのは、ほぼ100%の精度になってからかもしれません。
ジェスチャーがタッチより優れているのは、衛生面(触らなくていい)と、操作機器から少し離れた距離でも入力できるところでしょうか。
まだ先の印象ですが、キッチンとかで使われるようになるかもしれません。