
前回から作っている恐竜ロボットの試験動作を兼ね、ちょっと遊びます。
スマートグラス「MOVERIO」をかけた子供の首の振りに合わせて、恐竜も首を振るようにします。
MOVERIOと連動で首振り

子供が上を向いたら、恐竜も上を向きます。
MOVERIOのセンサーと連動して、Arduinoで作った恐竜ロボットが動きます。
サーボモーターをNode.jsで制御
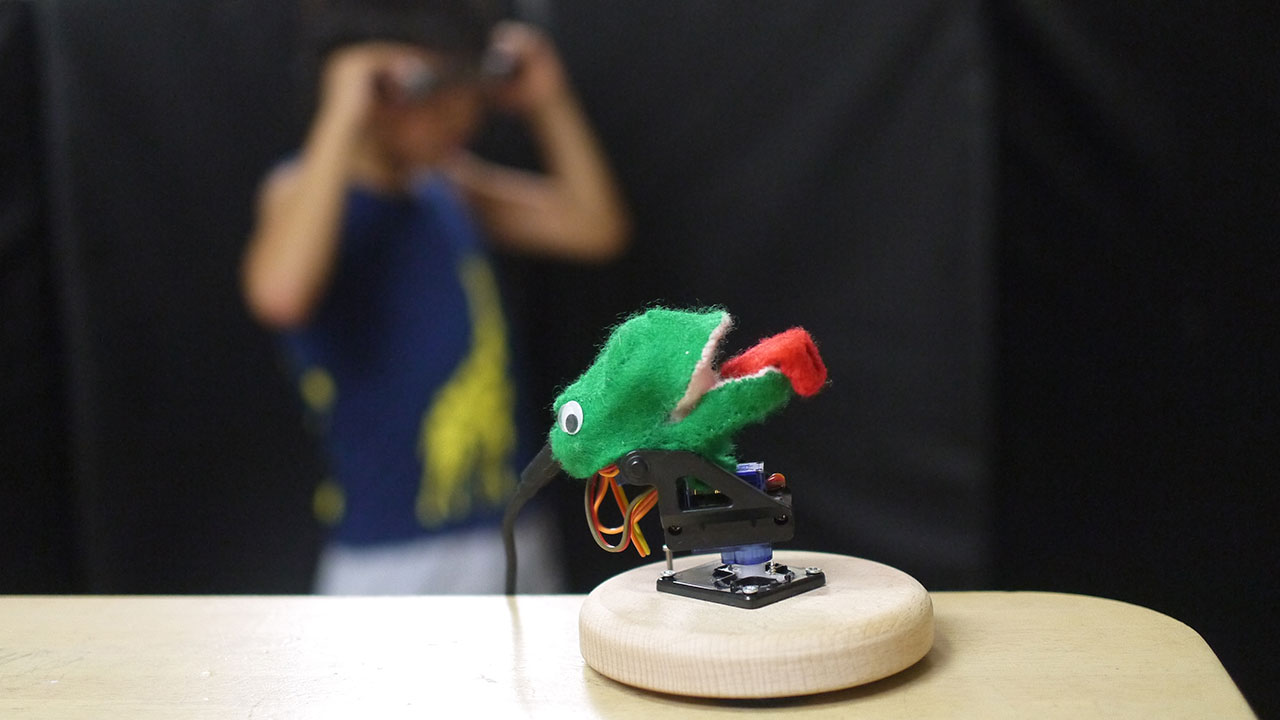
この、まぬけな顔の恐竜の頭部は、Arduino Nanoが組み込まれていて、サーボモーターを制御します。(中身は前回の記事に写真があります。)
ベロにはレーザー距離センサーが実装されていますが、今回は使いません。
後頭部はPCと接続するジャックがあり、USBで接続したPC(Node.jsサーバー)から、4方向(正面、右、左、上)向きの命令を受け取ります。
加速度センサーとジャイロセンサーで首の向きを

MOVERIOの加速度センサーで首の上下、ジャイロセンサーで首の振りを取得します。
MOVERIOのブラウザでHTMLを読み込んで、JavaScriptでセンサー値を取得し、Node.jsサーバーにSocket.ioで送っています。
MOVERIO(JavaScriptで首の方向取得)
↓無線LAN
PC(Node.jsでリアルタイムシリアル通信)
↓有線USB
恐竜ロボット(Arduinoでサーボモーター動作)
という流れです。
使いどころは?
今回の試作は、カメラ、ロボットの遠隔操作に使えそうです。
ローカルサーバーでの実験でしたが、リアルタイム性は高いです。遅延なしでMOVERIOとサーボモーターが連動していました。
遊びのように見えて、案外、必要性が高い分野かもしれません。
超高齢社会の日本ではロボットの補助が必須になるでしょう。
Webの知識でロボット制御は、近い将来、役に立ちそうな・・・そんな予感がします。