
サインスマートの3軸ロボットアームが自立しません。自立させるため三脚に取り付けようと思います。三脚とアームを接続するクイックシューを3Dプリントしました。
ロボットアームの底
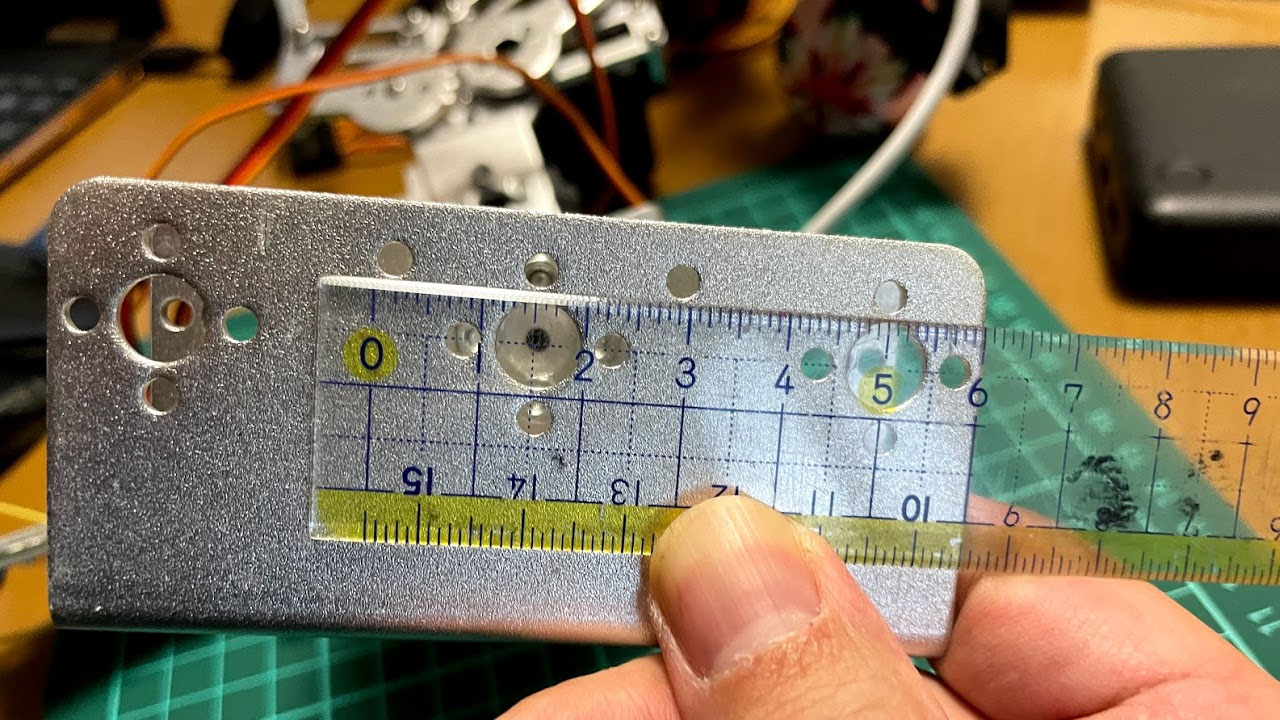
サインスマートのロボットアームの底には、何かと接続できるように穴がたくさん空いています。
穴の位置やサイズを計測して、三脚用のクイックシューをモデリングします。
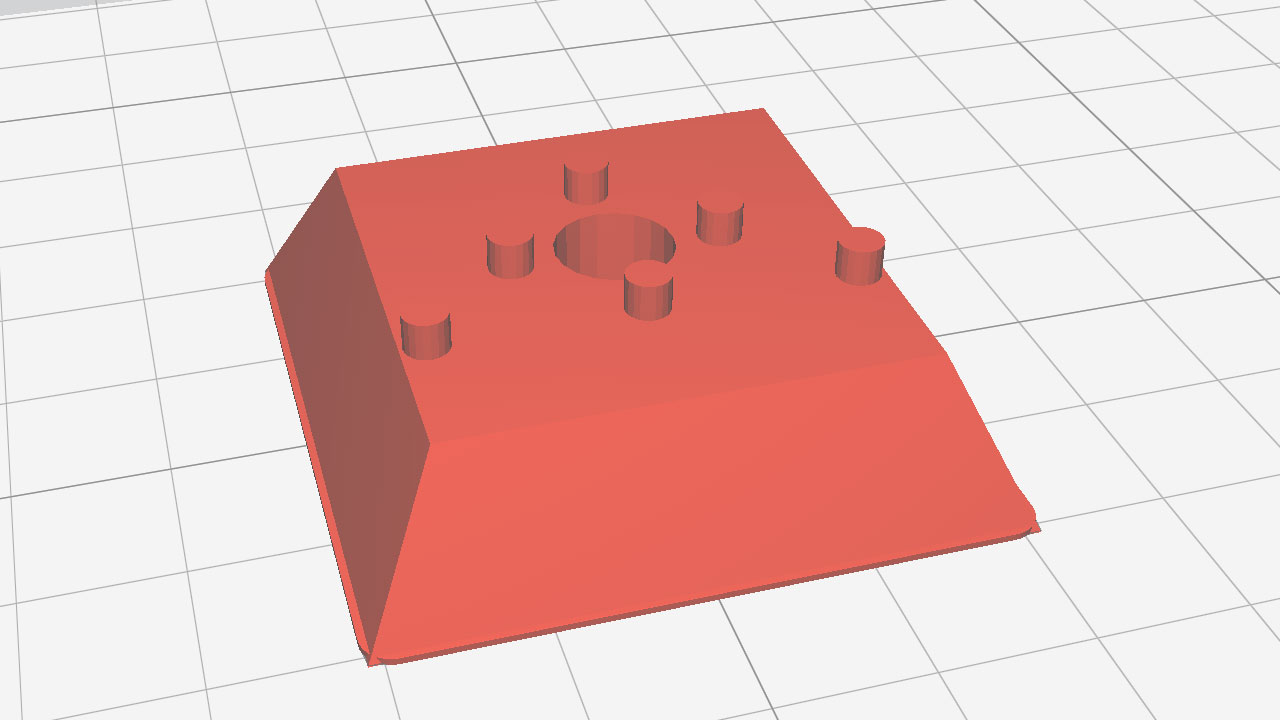
クイックシューを3Dプリント
フィラメントはPLA炭素繊維を使い、クイックシューを3Dプリントしました。
ある程度負荷がかかるパーツなので、強度が大事です。
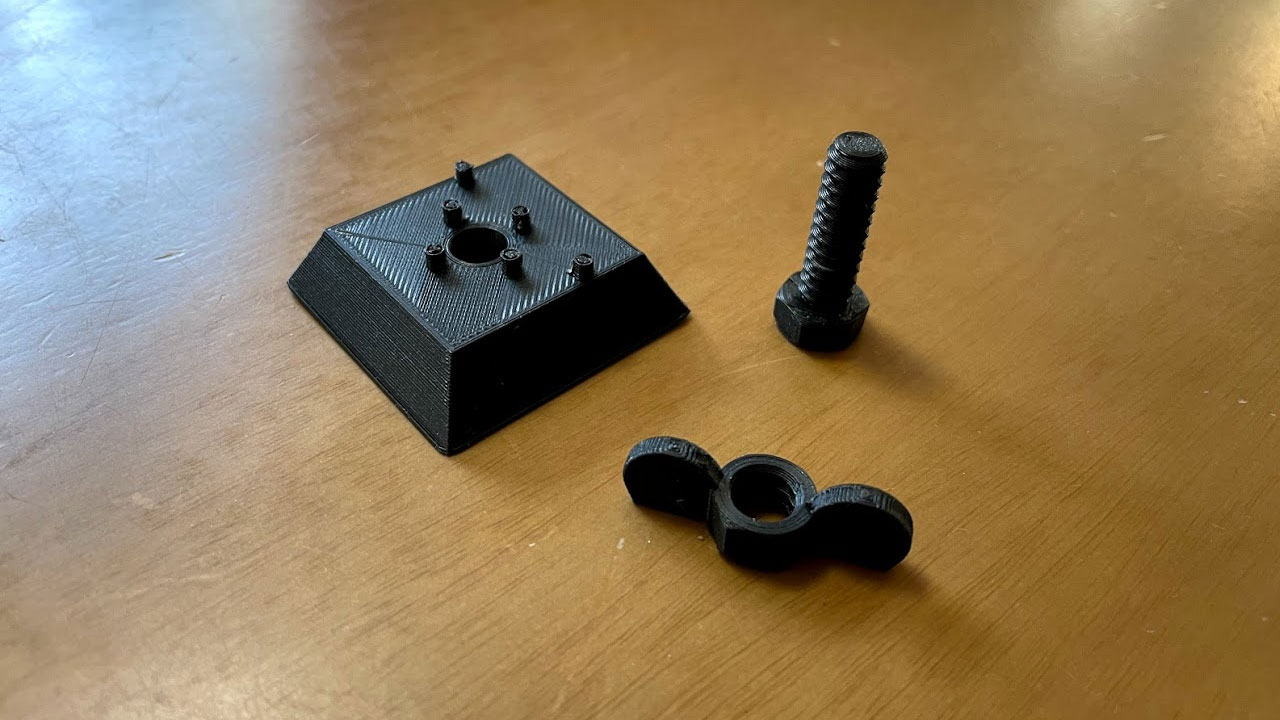
クイックシューとあわせて、8mmボルトも印刷。
強度が心配な場合、ボルトは金属製のものを購入しても良いでしょう。
クイックシュー組み立て

ボルトをクイックシューの裏側から挿します。

三脚に取り付け。ピッタリです。
クイックシューをアームに装着
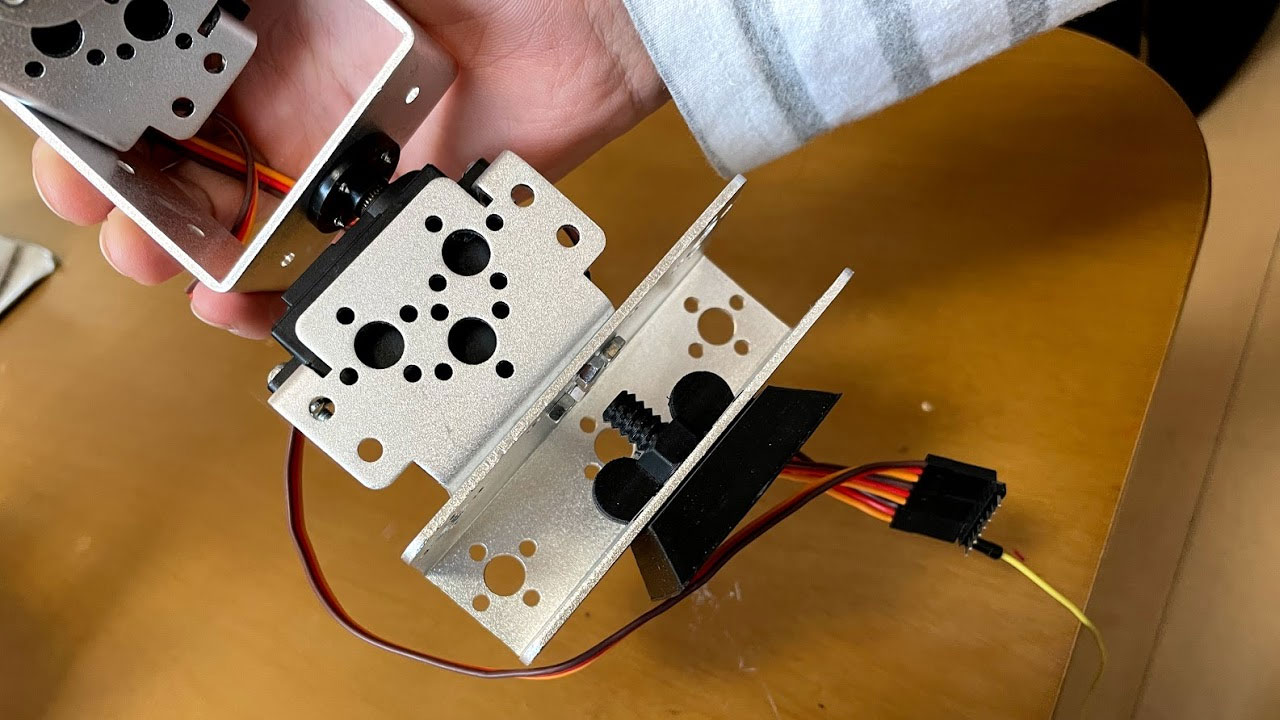
クイックシューの6つの突起を、アームの底にある穴に挿します。
さらにボルトで固定します。
これで、そう簡単にはズレません。
アームを三脚に装着

最後にクイックシュー付きアームを、三脚に装着します。
三脚に装着するメリットは、いくつかあります。
台に合わせて高さ調整ができること。
角度微調整が出来ること。
折りたたんで持ち運びできること・・・など。
実際に三脚に装着した状態で、アームを動かしても、ブレずに安定していました。