
ロボットアームに取り付けたカメラの視野が狭かったため、超広角カメラに取り換えました。アーム周囲の様子が分かり、格段に操縦しやすくなりました。
170度魚眼Webカメラ
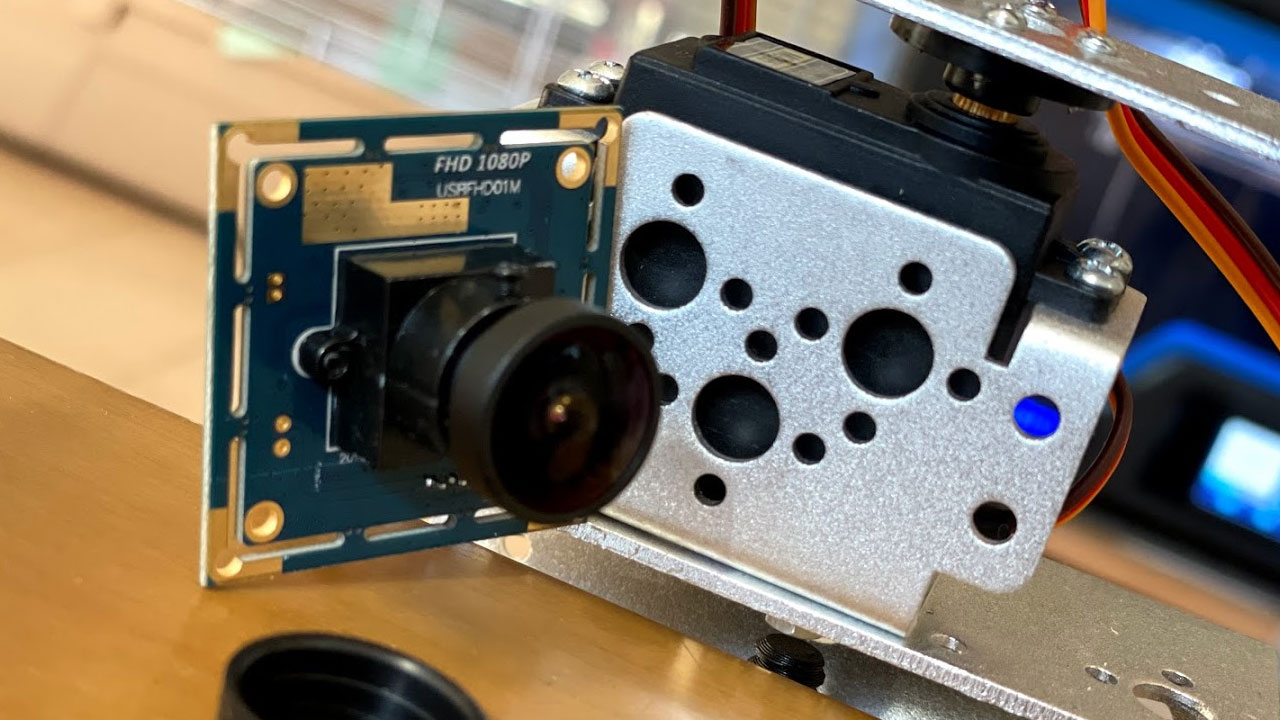
ELPの広角 170度魚眼レンズWebカメラを購入。
基板むき出しで、ロボット組み込みやすいネジ穴も空いています。
アーム装着用カメラケースを3Dプリント
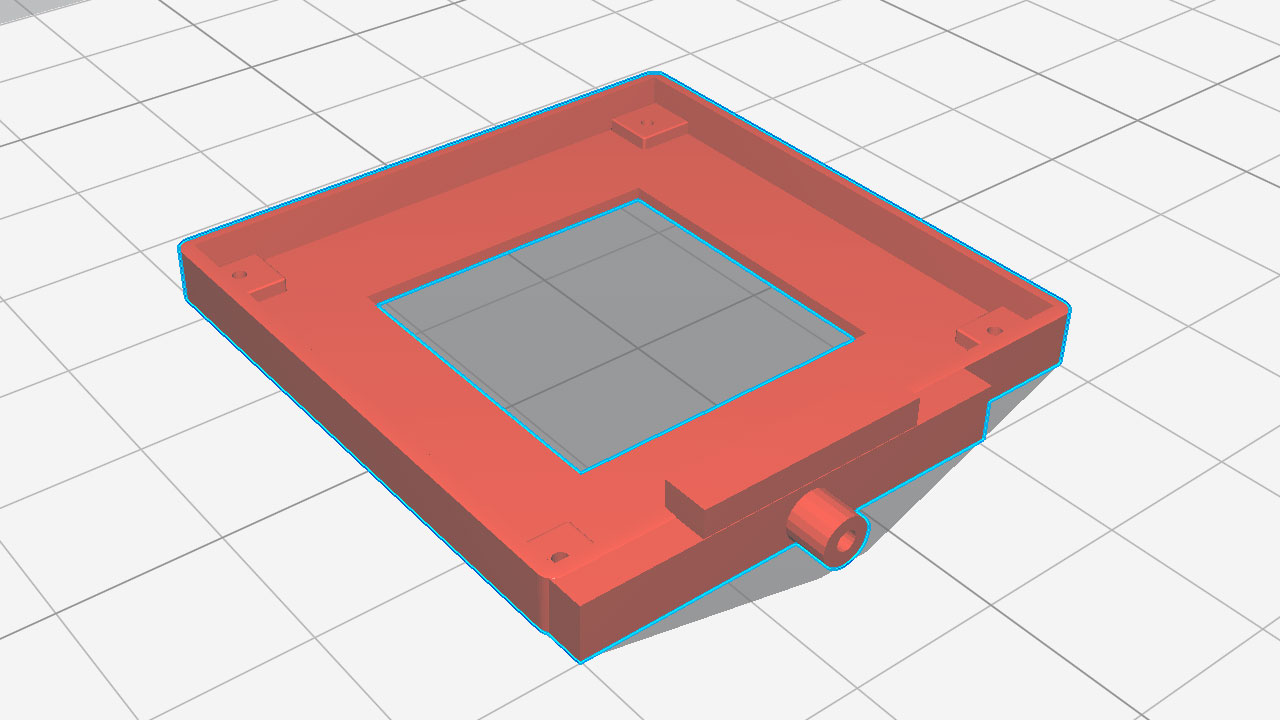
ロボットアームにカメラを固定したいと思います。
装着用のカメラケースをモデリングして3Dプリントします。
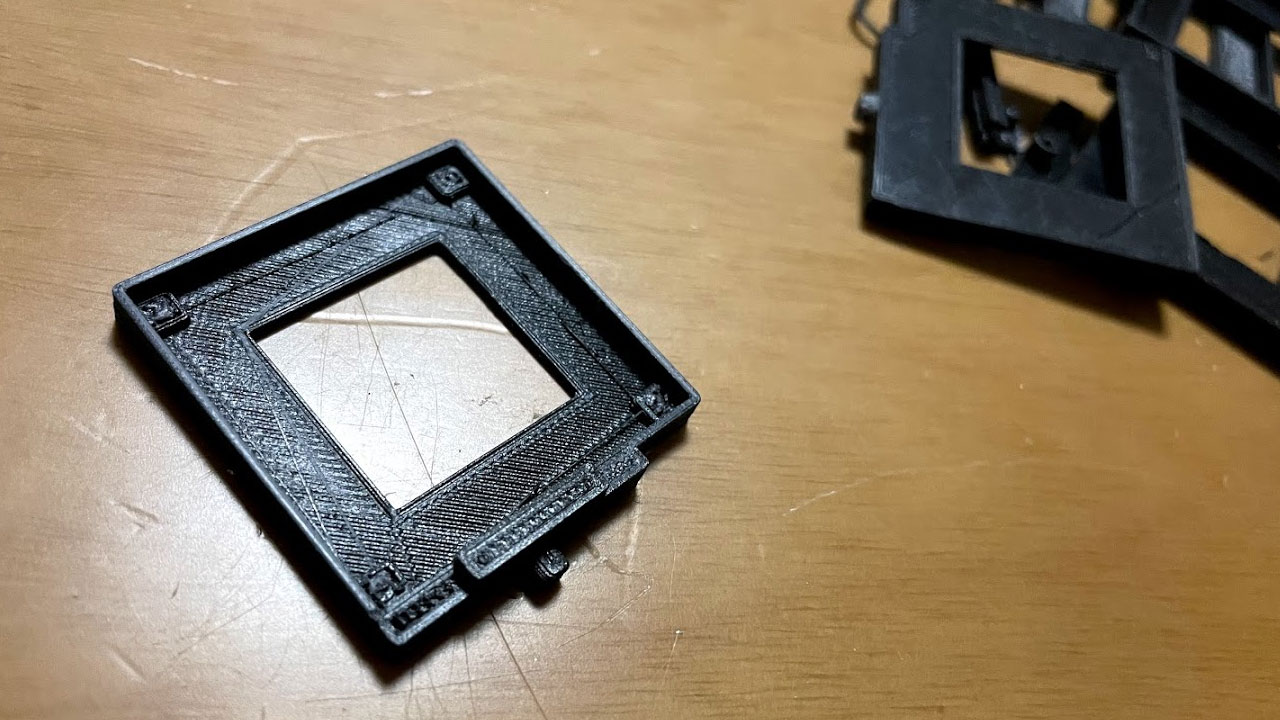
フィラメントは強度のあるPLA炭素繊維を使っています。
なかなかピッタリの形状にならず、何度もプリントしました。
カメラをネジ止め

プリントしたカメラケースにカメラをはめ、4か所ネジ止めします。
その後、アームハンド部分の穴にカメラケースを差し込みます。
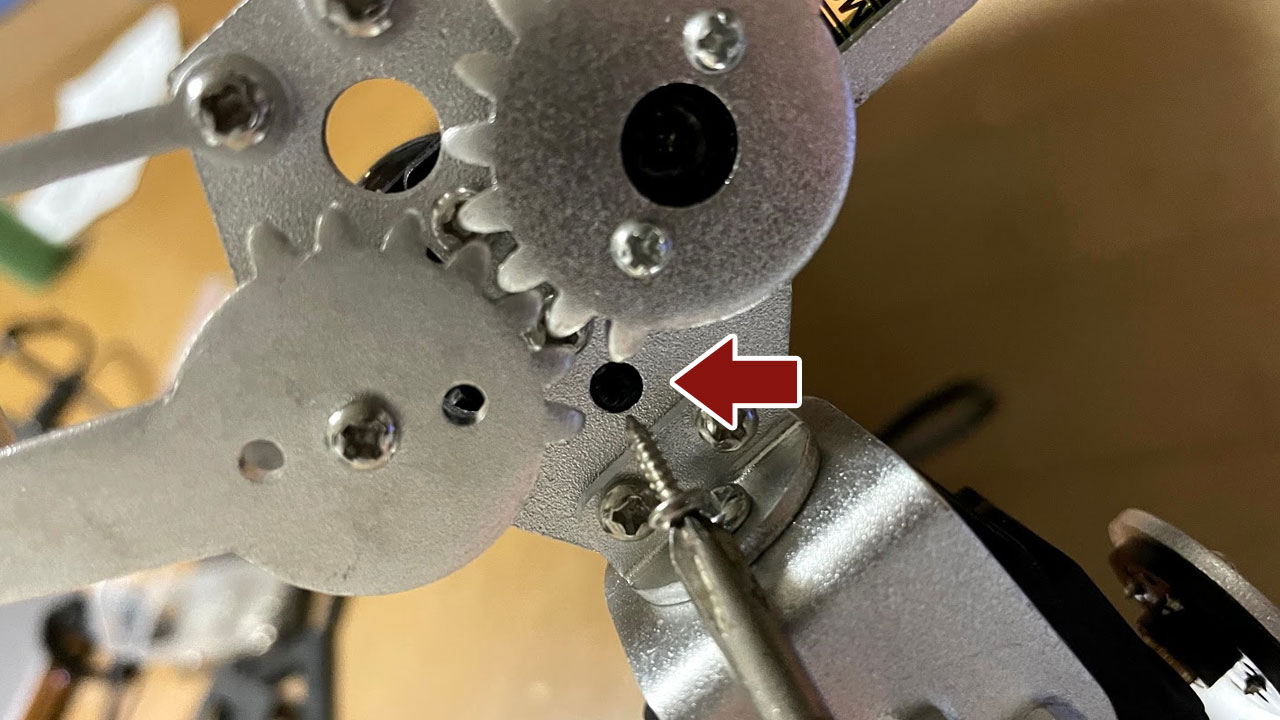
既にカメラケースは固定されて動きませんが、念のためアームハンドの裏からネジで止めます。
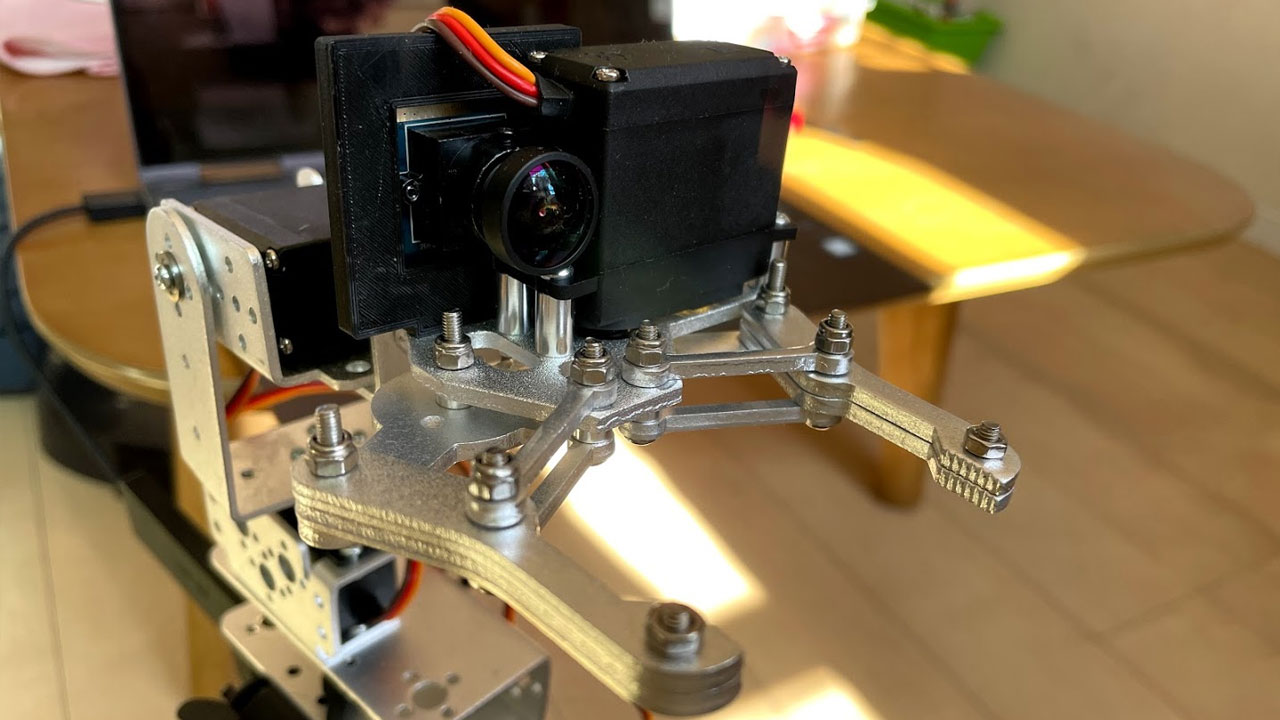
超広角カメラ装着完了
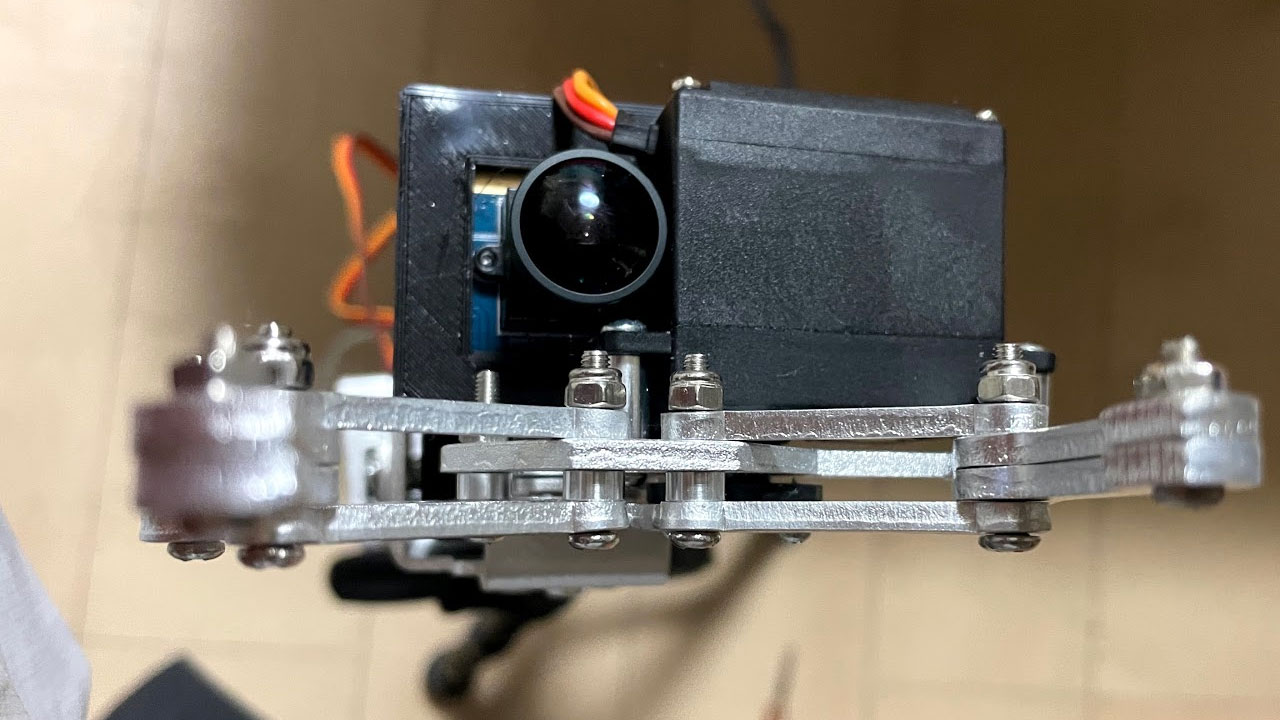
アームハンドにカメラが付きました。
サーボモーターの脇からレンズをのぞかせています。
操縦しやすい!

さすが画角170度。横にあるものも映り込みます。
これだけ広く映っていれば、アームをどちらの方向へ動かせばよいか把握できるため、操縦しやすくなりました。
あわせて操縦画面のUIを、視線操作できるように改修しています。