
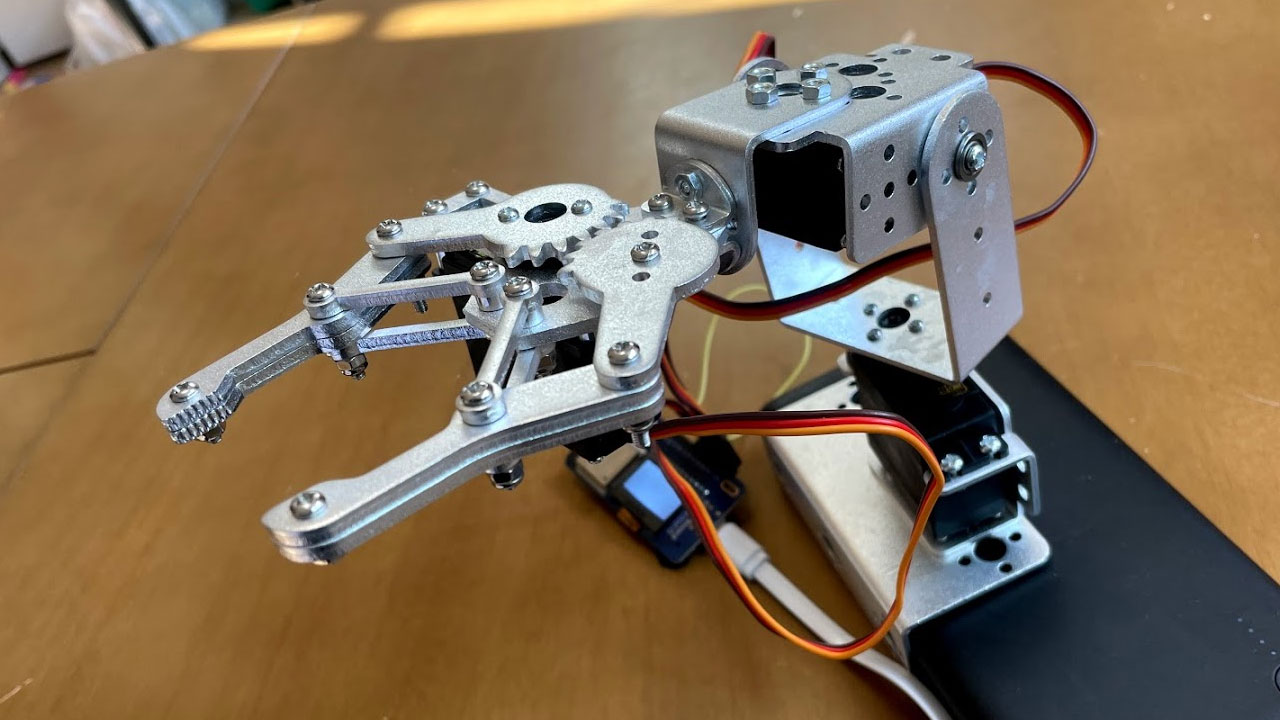
サインスマートのロボットアームを動くようにします。動力のサーボモーター「MG995」にobniz Boradをつなぎます。初代「obniz Board」の場合、別電源なしで動作するようです。
「obniz Board 1Y」導入
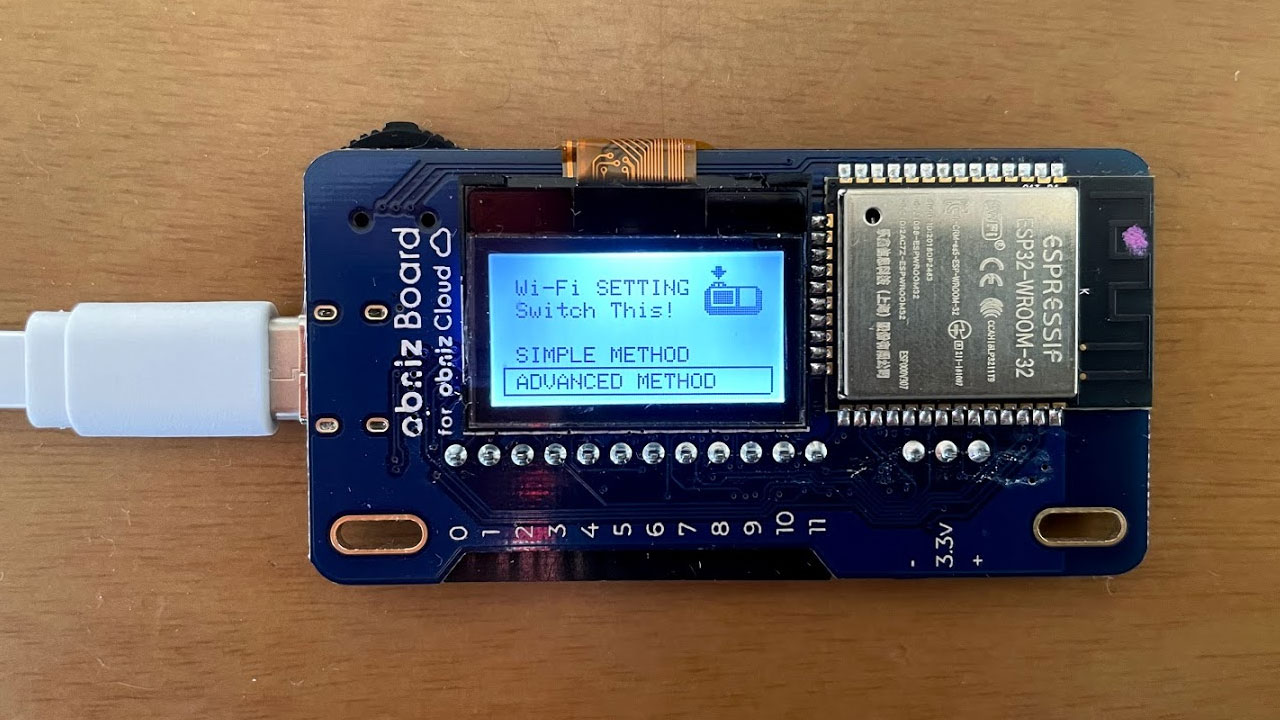
はじめに「obniz Board 1Y」を、ロボットアームの「MG995」につなぎました。
obniz Boardは、IoTを簡単に実現できるマイコンボードで、「1Y」が付くバージョンは乾電池で1年使うこともできる設計です。
「1Y」をロボットアームに使うには、少し無駄があるかもしれません。
動かない!たぶん電流不足
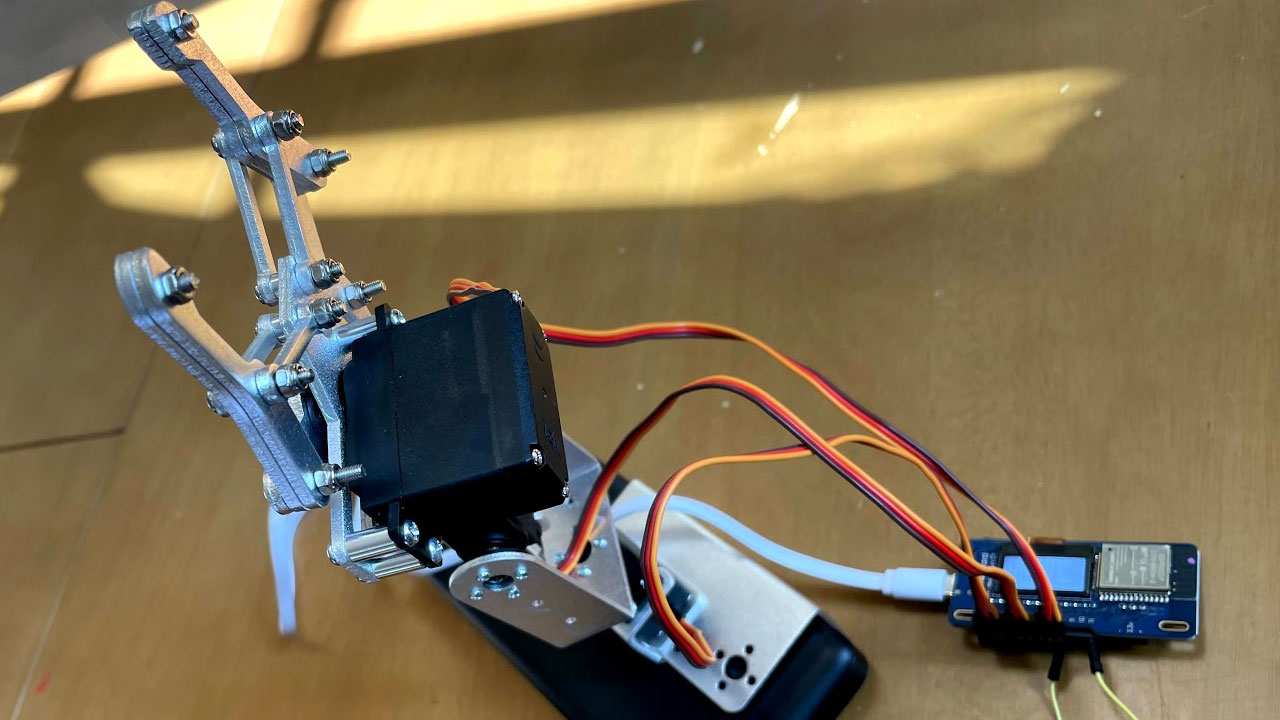
「obniz Board 1Y」でロボットアームを操作中、ボードの液晶が真っ白になり、頻繁に再起動してしまいます。
アームが止まってしまい、使えません。
たぶん、サーボモーター「MG995」の電流不足でしょう。
obniz公式ページにある「ioから直接電源供給を確認したサーボモーター一覧」には、「MG995」が載っていません。
サーボモーターは別電源を用意する必要がありそうです。
初代「obniz Board」なら動く
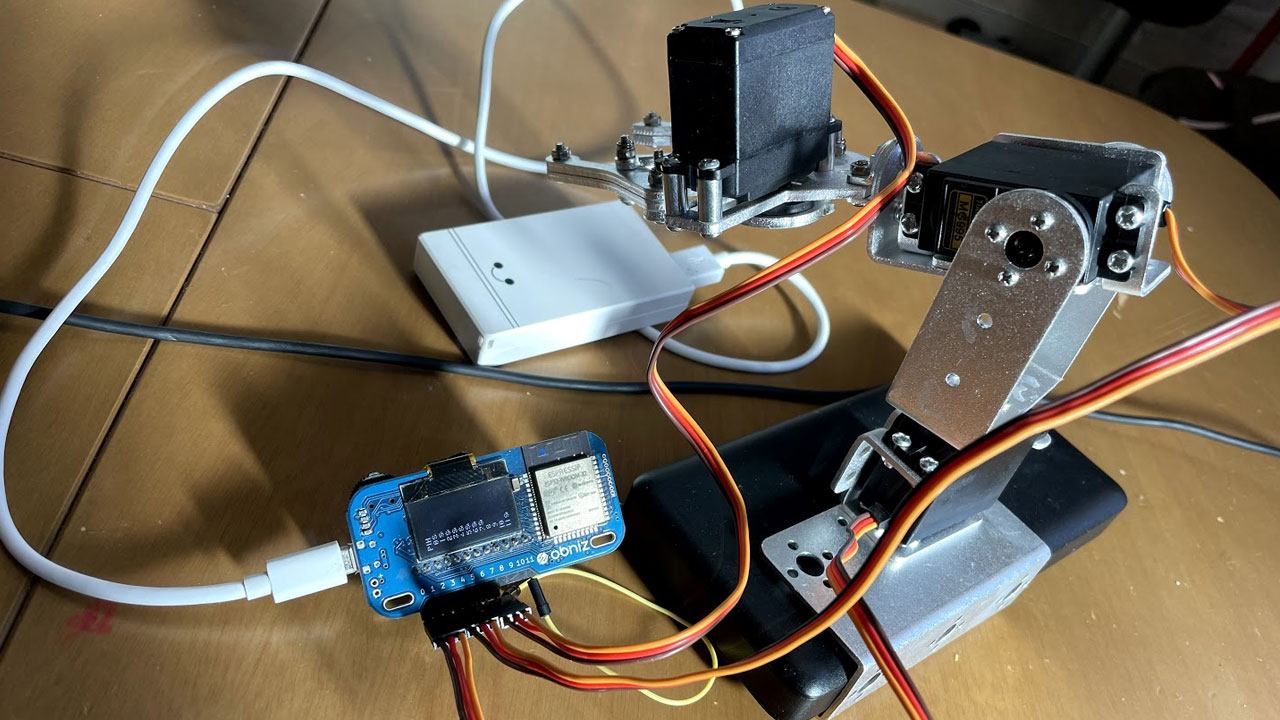
別電源の用意が大変なので、試しに初代「obniz Board」に交換してみました。
すると、問題なく動きます!
ioピンからの直接電源供給は、簡単でありがたいです。
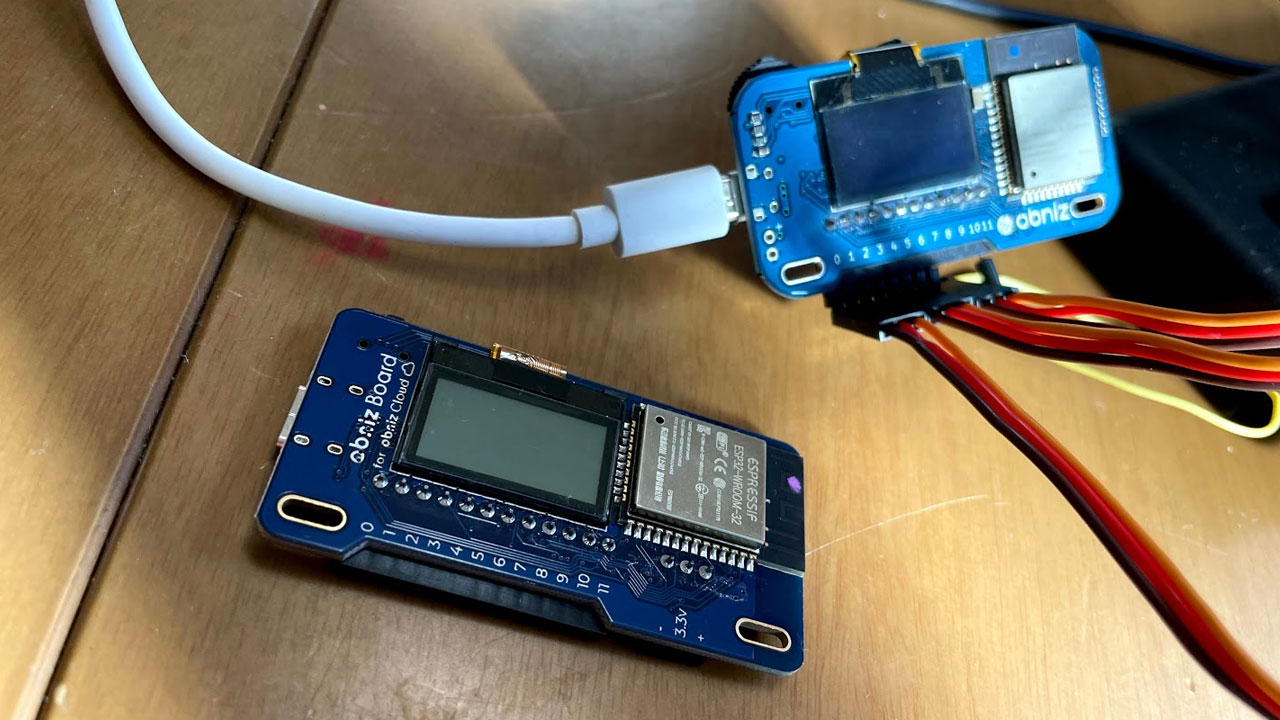
写真左手前が「obniz Board 1Y」。右奥が「obniz Board」です。
握力を試してみる

やはり、サーボモーター「MG995」だと、力強いです。
試しに掴んだてまりが潰れそう。
今度は調理用の測りを掴んでみました。
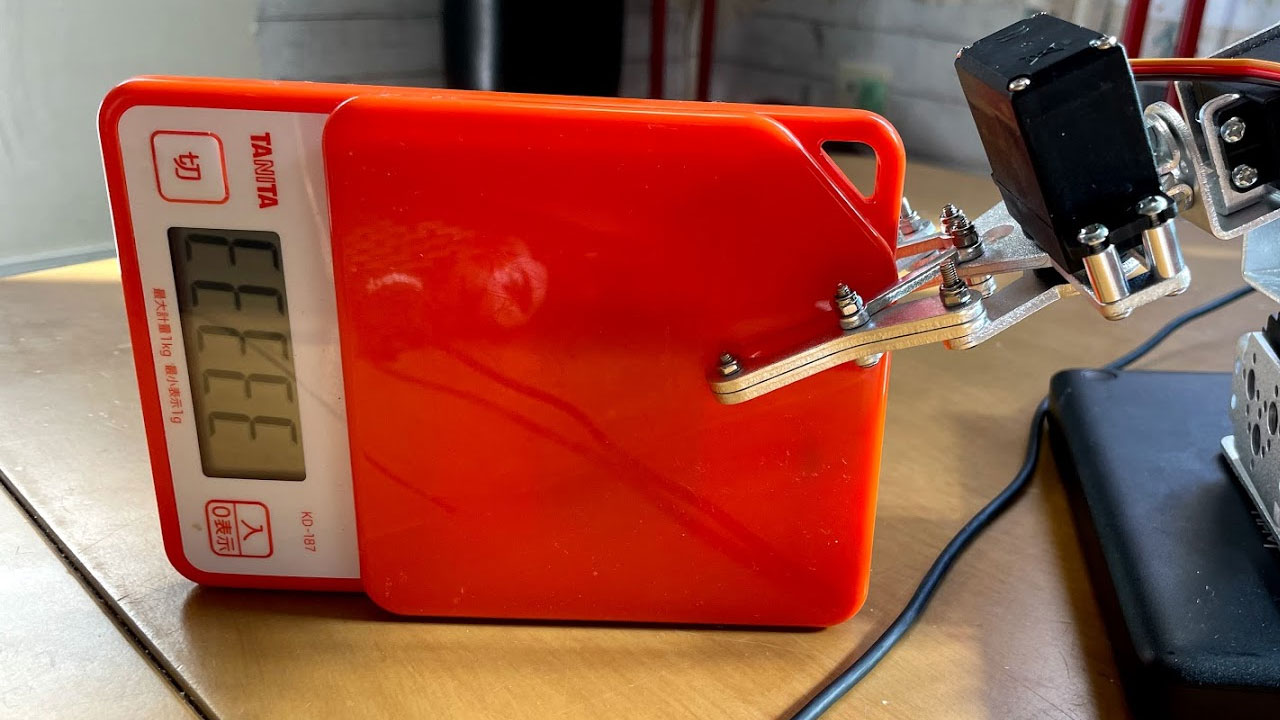
最大計測1kgを超えて、測れません。
1kg以上の握力があれば、掴めるものも多いでしょう。
これでサインスマートのロボットアームを最低限動かせるようになりました。
次にロボットアームの土台を作ります。(今は仮で、モバイルバッテリーを重石にしてますが不安定です。)