
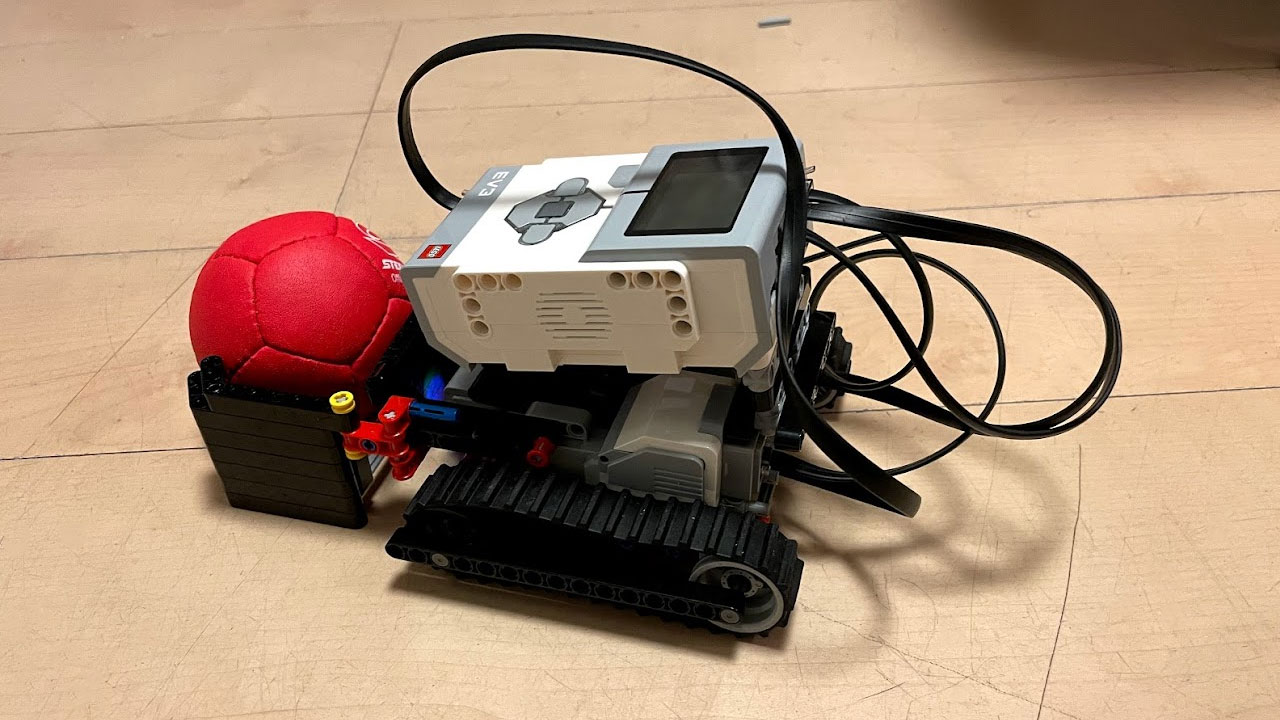
マインドストームで作った自動ロボットで、ボッチャボールを回収します。前回から試行錯誤して、見事ボールを持ち帰るロボットが完成しました。
テストと改善の繰り返し
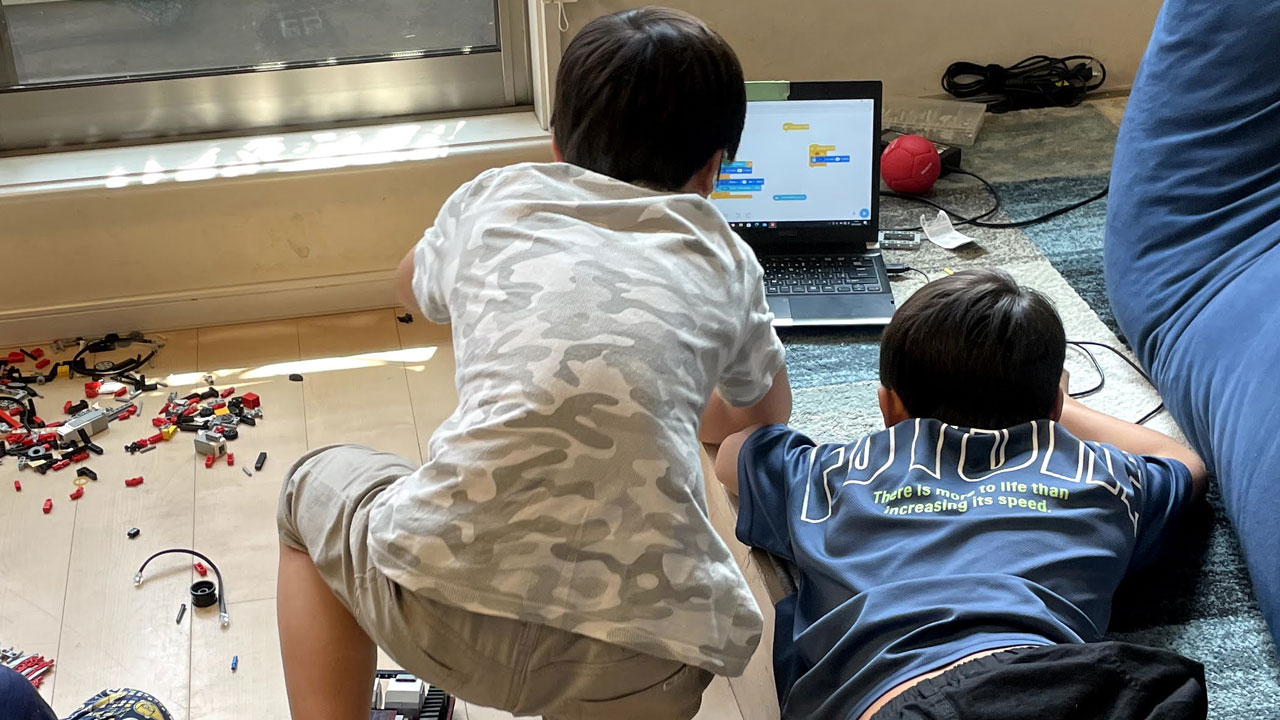
小学生の長男がプログラミングをしながら、ボッチャボールを持ち帰る自動運転ロボットを作っています。途中から次男もプログラミングに参加しています。
前回はスイッチセンサーにボールが触れたら旋回するようなプログラムをつくっていました。
しかし、走行のプログラムを追加した時、問題が発生。
スイッチがボールに当たっても、押し込むことができないことに気づいたようです。
センサーを変えます。
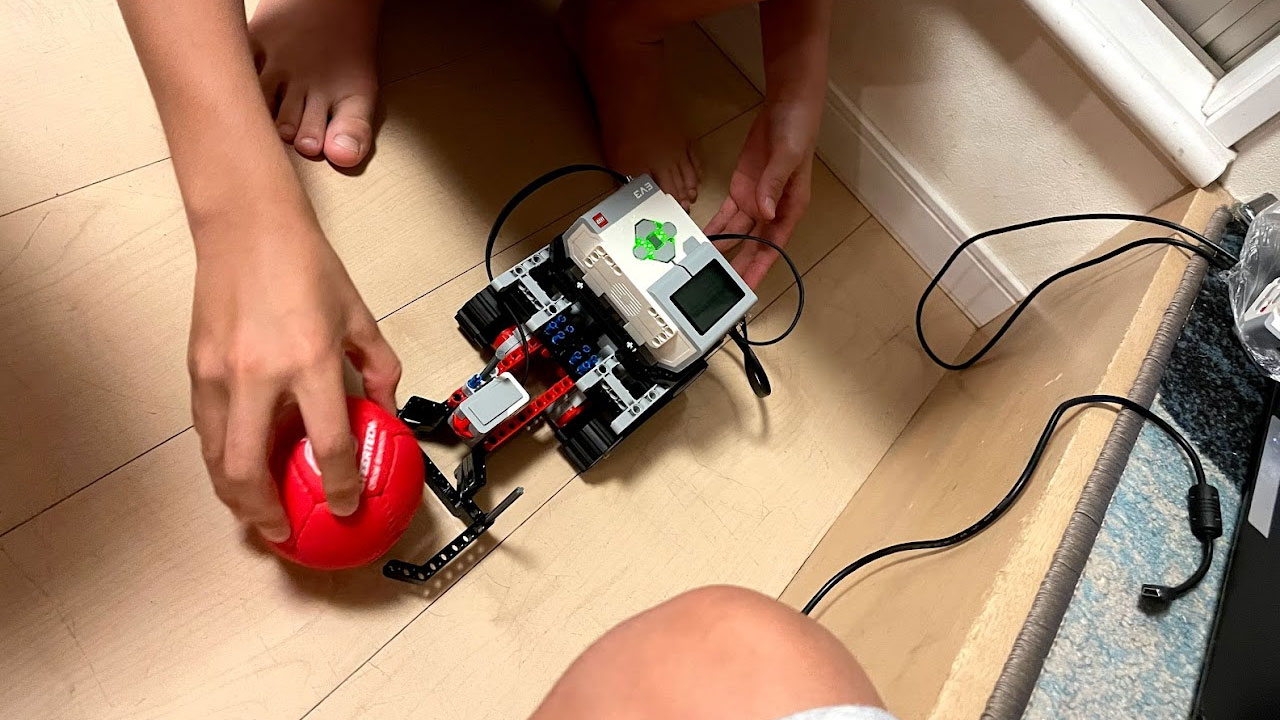
まさかの色センサー
スイッチセンサーを色センサーに改修しています。
単純に考えると距離センサーだと思ったのですが、まさかの色センサー。
たしかにこれなら、ボールの色によって運ぶ場所を変えるなど、拡張性があります。
しかも赤ボールを見つけたら、旗みたいなものが降りて、色センサーを物理的に遮っています。
赤を見つけたときに旋回する処理が繰り返されるのを防いでいるのでしょう。
多分、プログラミングで繰り返しを防ぐことはできると思いますが、物理遮断の動作がカッコいいので、これも正解でしょう。
ボール自動回収ミッション完了
ボッチャボール自動回収ロボットの完成です。
進んだ距離を記録しているので、自分の手元に戻ってきて止まります。その実装も驚きました。
ただ、180度ターンが難しいようで、160~200度くらいの間でブレるとのことです。
それくらい、いいんじゃないかな。
私が調べてみても、マインドストームのモーターで正確な動作は難しいようでした。
失敗を楽しむ
長男にとって、マインドストームで作る初めての自作ロボットです。
いくつもの失敗を喜びながら、3日くらい試行錯誤し、完成までを楽しんでいました。